



BigDog es un robot andador, cuadrúpedo, dinámicamente estable, para uso militar. Fue creado en 2005 conjuntamente por las compañías Boston Dynamics y Foster-Miller, el Laboratorio de Propulsión a Chorro de la Nasa y la Concord Field Station de la Universidad de Harvard. Mide 0,91 m de largo, por 0,76 de alto y pesa 110 kg; más o menos como una mula pequeña. Es capaz de atravesar terrenos complicados a una velocidad de 6,4 km/h cargando hasta 150 kg de peso y de subir pendientes de 35°. Un ordenador de a bordo controla la tracción, en base a las entradas que recibe de los múltiples sensores con los que cuenta el robot, así como la navegación y el equilibrio.
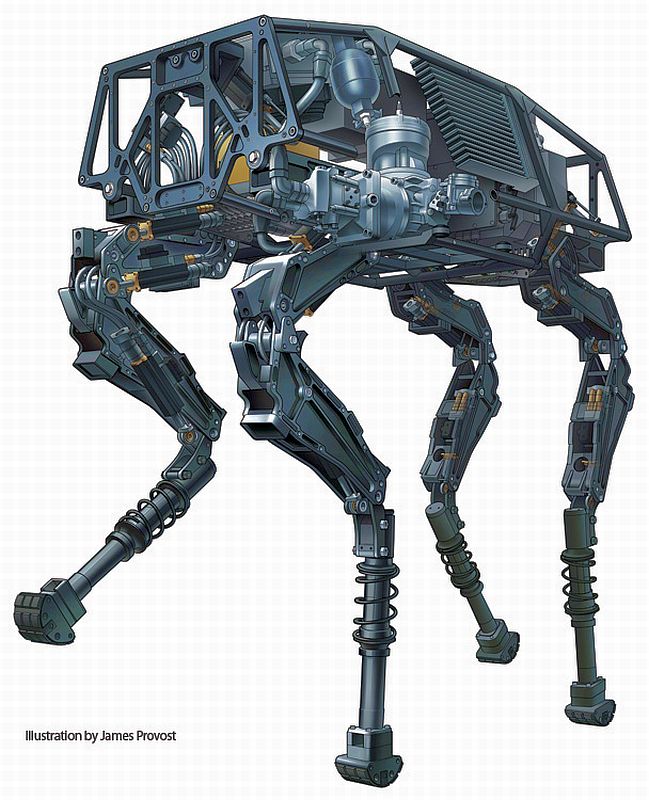
El desarrollo fue llevado acabo por la Defense Advanced Research Projects Agency con la intención de crear un vehículo robótico capaz de realizar la función de una mula de carga, acompañando a los soldados desplegados en terrenos demasiado agrestes para los vehículos convencionales. En lugar de ruedas u orugas, BigDog usa piernas para desplazarse, permitiendo el movimiento por superficies impracticables para vehículos dotados con esos otros sistemas. Las piernas están dotadas de una variedad de sensores, que miden, por ejemplo, la posición de la articulación o el contacto con el suelo. También cuenta con un giróscopo láser y un sistema de visión estéreo.
Fue presentado en el programa de televisión Web Junk 20 así como en artículos en las revistas New Scientist, Popular Science, Popular Mechanics, y The Wall Street Journal. BigDog, tiene la capacidad de andar por terreno congelado y de recuperar el equilibro tras ser golpeado lateralmente.
BigDog está alimentado por un motor 15-HP go-kart de dos tiempos y un cilindro a 9.000 rpm, el cual acciona una bomba hidráulica, la cual a su vez acciona los actuadores de las piernas. Cada pierna tiene cuatro actuadores, dos para el junte con la cadera, uno para la rodilla y otro para el tobillo, por lo que cada robot tiene un total de 16. Cada actuador consiste de un cilindro hidráulico, una servoválvula y sensores de fuerza y posición.
El ordenador de a bordo consta de una placa base PC/104 modificada, con un procesador Pentium 4. Utiliza QNX como sistema operativo.
Fuente: Wikipedia
El desarrollo fue llevado acabo por la Defense Advanced Research Projects Agency con la intención de crear un vehículo robótico capaz de realizar la función de una mula de carga, acompañando a los soldados desplegados en terrenos demasiado agrestes para los vehículos convencionales. En lugar de ruedas u orugas, BigDog usa piernas para desplazarse, permitiendo el movimiento por superficies impracticables para vehículos dotados con esos otros sistemas. Las piernas están dotadas de una variedad de sensores, que miden, por ejemplo, la posición de la articulación o el contacto con el suelo. También cuenta con un giróscopo láser y un sistema de visión estéreo.
Fue presentado en el programa de televisión Web Junk 20 así como en artículos en las revistas New Scientist, Popular Science, Popular Mechanics, y The Wall Street Journal. BigDog, tiene la capacidad de andar por terreno congelado y de recuperar el equilibro tras ser golpeado lateralmente.
BigDog está alimentado por un motor 15-HP go-kart de dos tiempos y un cilindro a 9.000 rpm, el cual acciona una bomba hidráulica, la cual a su vez acciona los actuadores de las piernas. Cada pierna tiene cuatro actuadores, dos para el junte con la cadera, uno para la rodilla y otro para el tobillo, por lo que cada robot tiene un total de 16. Cada actuador consiste de un cilindro hidráulico, una servoválvula y sensores de fuerza y posición.
El ordenador de a bordo consta de una placa base PC/104 modificada, con un procesador Pentium 4. Utiliza QNX como sistema operativo.
Fuente: Wikipedia
No hay comentarios.:
Publicar un comentario
Me gustaría conocer tus comentarios, solo ten en cuenta que este Blog y su Administrador se reservan el derecho de eliminar aquellos comentarios abusivos, obscenos, injuriantes, discriminadores y/o contrarios a las leyes de la República Mexicana.